
建议PID参数调节步骤:
(1)前提条件:反馈信号是否稳定,执行机构是否正常以及控制器的正反作用。(确保PID在自动模式下)
(2)积分时间设置为无穷大INF(或9999.9),此时积分作用近似为0;将微分时间设置为0.0,此时微分作用为0 。然后开始调节比例作用,逐步增大比例增益
(3)当过程变量达到给定值且在给定值上下波动,将调好的比例系数调整到50%~80%后,由大到小减小积分时间,直到过程值与设定值相等或无限接近
PID调节有很多种方法,以上仅是建议步骤,也并未考虑微分作用,客户依据实际情况灵活调节,同时可以参考反馈与给定的曲线图
用户经常会遇到这样的问题:尝试了很多组PID参数,都无法满足控制器的要求, 此时需要考虑PID的采样时间是否适合当前系统。采样时间就是对反馈进行采样的间隔。短于采样时间间隔的信号变化是不能测量到的。采样时间过短,两次实测值的变化量太小,也不合适,而且增加PLC的运算负担;采样间隔过长,将会引起有用信号的丢失,使系统品质变差,不能满足扰动变化比较快、或者速度响应要求高的场合。除此以外,也有可能是系统自身的问题,无法调节到稳定,例如, 不规律的干扰,或者反馈信号不稳定。
在开始PID自整定调整前,整个PID控制回路必须工作在相对稳定的状态。
稳定的PID是指过程变量接近设定值,输出不会不规则的变化,且回路的输出值在控制范围中心附近变化。
问题与解决方法:
1.PID输出总是输出很大的值,并在这一区间内调节变化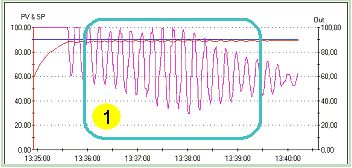



1.超调过大,减小比例,增大积分时间
2.迅速变化,存在小超调
3.实际值缓慢接近设定值,并且无超调的达到设定值
4.增益系数太小和/或微分时间太长
5.益系数太小和/或积分时间太长
电话:13818569113
邮箱:13818569113@139.com
网址:http://www.xmzgk.com
地址:中国上海市青浦区崧盈路398号6栋
 15721373211
15721373211